|
I am a third year PhD student at University of Luxembourg advised by Holger Voos, working primarily on Situational Awareness for robots , 3D scene understanding, and SLAM. Recently I'm interested in leveraging prior knowledge of environment, and how it could change how we interact with 3D. Previously I finished my bachelor's in Mechtronics Engineering at NUST Pakistan, and completed my master's in Robotics at SDU Denmark, where I worked with Leon Bodenhagen on LiDAR SLAM. |

|
|
|
|
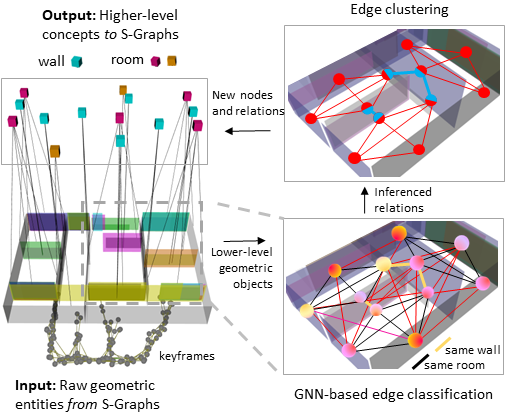
Jose Andres Millan-Romera, Hriday Bavle, Muhammad Shaheer, Martin R. Oswald, Holger Voos, Jose Luis Sanchez-Lopez ICRA 2024 arXiv / Video We propose a Graph Neural Network (GNN) for learning high-level semantic- relational concepts that can be inferred from the low-level factor graph |
|
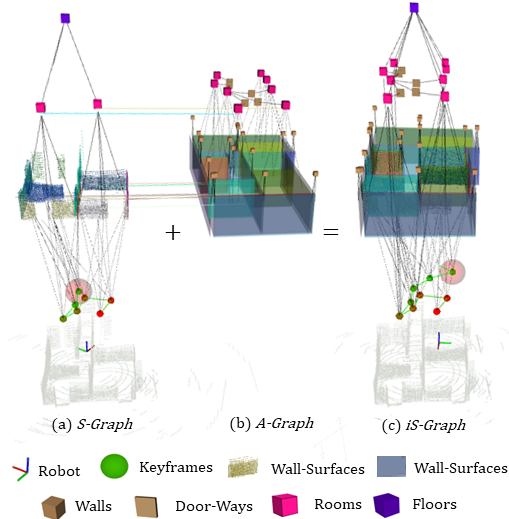
Muhammad Shaheer , Jose Andres Millan-Romera, Hriday Bavle, Jose Luis Sanchez-Lopez, Javier Civera, Holger Voos IROS 2023 arXiv / Video We develop a method for converting the plan of a building into an architectural graph (A-Graph). When the robot starts moving in an environment, and it estimates an online situational graph representation (S-Graph) of its surroundings. We develop a novel graph-to-graph matching method, to relate the S-Graph and A-graph. |
|
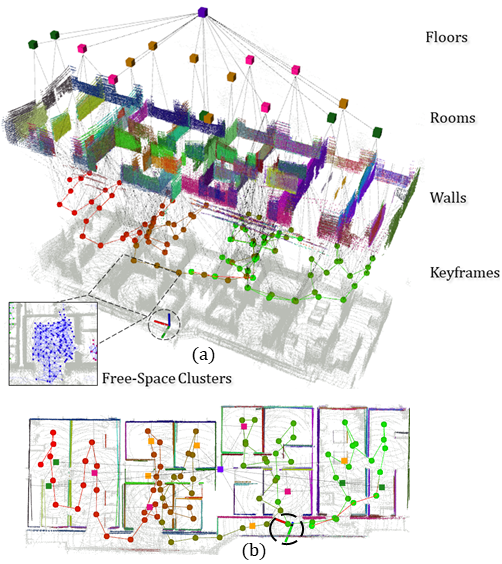
Hriday Bavle, Jose Luis Sanchez-Lopez, Muhammad Shaheer, Javier Civera, Holger Voos RA-L 2023, Oral Presentation arxiv / IEEE access We present an evolved version of Situational Graphs, which jointly models in a single optimizable factor graph (1) a pose graph, as a set of robot poses, and (2) a 3D scene graph, as a high-level representation of the environment that encodes its different geometric elements with semantic attributes and the relational information between them. |
|
|
|
Source code taken from Jon Barron's site. |